ROSからのmyCobot280の制御
はじめに
myCobot買ってからROSで動かすまでにハマったのでメモ
【環境】
Windows10+WSL2+Ubuntu18.04+ROS melodic
WSL2からのUSBデバイスの利用は下記記事を参照
kakepro.hatenablog.com
myCobotへのファームウェアの書き込み
ここがハマったところ
・Atom(頭)にはAtomMain
・Basic(根本)にはminiRobotV3*1
をそれぞれ焼く
ファームウェアの書き込みには以下の記事を参考に「myCobot固件烧录器」を使った。
robohase01.hatenablog.com
その後BasicとPCをUSBで接続し、Basic側でTransponderを選択する
ROS melodicのインストール
【下準備】
$ sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
$ sudo apt install -y curl
$ curl -sSL 'http://keyserver.ubuntu.com/pks/lookup?op=get&search=0xC1CF6E31E6BADE8868B172B4F42ED6FBAB17C654' | sudo apt-key add -
【インストール】
$ sudo apt update
$ sudo apt upgrade
$ sudo apt install -y ros-melodic-desktop-full
【初期設定】
$ sudo apt install python-rosdep
$ sudo rosdep init
$ rosdep update
【環境設定・その他インストール】
$ cd
$ echo "source /opt/ros/melodic/setup.bash" >> ~/.bashrc
$ source ~/.bashrc
$ sudo apt install -y python-rosinstall python-rosinstall-generator python-wstool build-essential python-catkin-tools
$ sudo apt install ros-melodic-moveit
$ sudo apt-get install ros-melodic-joint-state-publisher-gui
myCobotをROSから動かす
【ワークスペースの作成】
$ mkdir -p ./mycobot_ws/src
【公式パッケージのインストール・ビルド】
$ sudo apt install python-pip
$ pip install pymycobot --upgrade
$ cd ./mycobot_ws/src
$ git clone https://github.com/elephantrobotics/myCobotROS.git
$ cd ../
$ catkin build
$ source devel/setup.bash
【動かしてみる】
$ sudo chmod 666 /dev/ttyUSB0*2
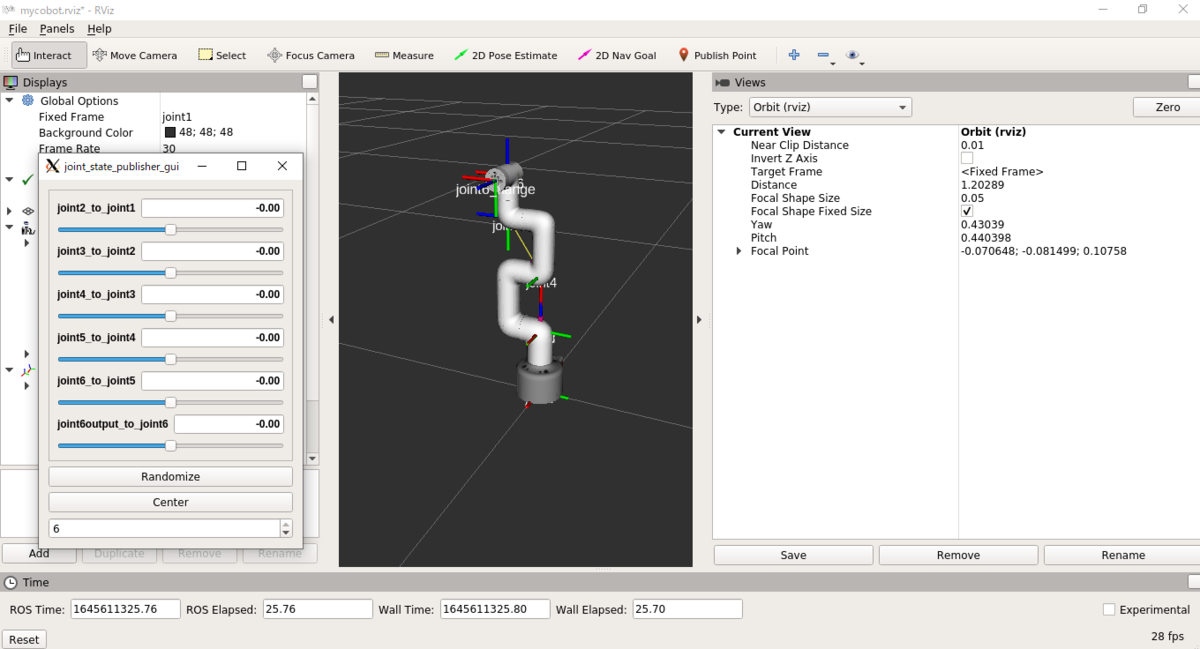
・Terminal 1
$ roslaunch mycobot_280 slider_control.launch
・Terminal 2
$ rosrun mycobot_280 slider_control.py
スライドバーを動かすとmyCobotも動く(動画とってないけど実機も動く)
参考
*1:BasicにTransponderを焼いてもうんともすんとも言わなかった
*2:PowerShellからusbipd wsl attach --busid *-*しておくこと